Hohlwellen-schrittmotorlösung in der robotergelenksteuerung
Ngày đăng: 5/7/2025 4:59:04 PM - Điện tử, điện lạnh - Toàn Quốc - 67Chi tiết [Mã tin: 5990198] - Cập nhật: 22 phút trước
Die Steuerung von Robotergelenken stellt hohe Anforderungen an Präzision, Kompaktheit und mechanische Integration. In diesem Zusammenhang gewinnen Hohlwellen-Schrittmotoren zunehmend an Bedeutung, da sie eine effektive Lösung für moderne Robotikanwendungen darstellen. Diese Motoren kombinieren die Vorteile der Schrittmotortechnologie mit einer speziell gestalteten Hohlwelle, die flexible mechanische Schnittstellen ermöglicht.
1. Was ist ein Hohlwellen-Schrittmotor?
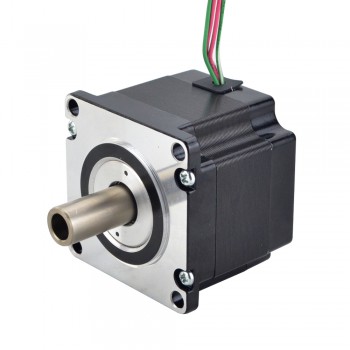
Ein Hohlwellen-Schrittmotor ist ein Schrittmotor, dessen Rotor eine zentrale Bohrung besitzt – die sogenannte Hohlwelle. Diese ermöglicht es, Kabel, Achsen oder andere mechanische Elemente direkt durch den Motor hindurchzuführen. Die Schrittmotorfunktion selbst basiert auf dem Prinzip der elektromagnetischen Ansteuerung einzelner Phasen, wodurch sich der Rotor schrittweise und präzise bewegt.
2. Vorteile für die Robotergelenksteuerung
In Robotersystemen, besonders bei mehrachsigen Industrierobotern oder kollaborativen Robotern (Cobots), bietet die Hohlwellen-Schrittmotorlösung mehrere entscheidende Vorteile:
Kompakte Integration: Die Hohlwelle erlaubt es, Encoder, Sensorleitungen oder mechanische Gelenkteile durch den Motor zu führen, was den Bauraum reduziert und eine sehr kompakte Gelenkarchitektur ermöglicht.
Hohe Positioniergenauigkeit: Durch die inhärente Schritt-für-Schritt-Ansteuerung eignen sich diese Motoren ideal für Anwendungen, bei denen exakte Winkelpositionen ohne Feedbacksysteme erforderlich sind.
Drehmomentstark bei niedriger Drehzahl: Schrittmotoren liefern ein hohes Haltemoment, was besonders in Gelenken mit langsamer, kontrollierter Bewegung von Vorteil ist.
Kosteneffizienz: Im Vergleich zu Servoantrieben sind Schrittmotorlösungen häufig günstiger in der Anschaffung und einfacher in der Ansteuerung.
3. Typische Anwendungen
Gelenkachsen in kollaborativen Robotern: Platzsparende Integration in den Ellbogen- oder Handgelenkbereich.
Medizinrobotik: Beispielsweise in Operationsrobotern, bei denen hohe Präzision bei begrenztem Bauraum entscheidend ist.
Kamera- oder Sensor-Positionierungssysteme: Die Hohlwelle erlaubt die Durchführung von Kabeln zur Signalübertragung ohne externe Schleifringe.
4. Herausforderungen und Lösungsansätze
Trotz der Vorteile gibt es bei Hohlwellen-Schrittmotoren auch Herausforderungen:
Resonanzeffekte: Aufgrund der diskreten Schritte kann es zu Vibrationen kommen, die durch Mikroschrittbetrieb oder Dämpfungsmechanismen reduziert werden.
Drehmomentabfall bei höheren Drehzahlen: Dies kann durch geeignete Getriebe oder Hybridlösungen (z. B. mit Harmonic Drive) kompensiert werden.
Offene Regelung: In kritischen Anwendungen kann die Kombination mit einem Encoder sinnvoll sein, um die Position rückzumelden und so eine geschlossene Regelung zu ermöglichen.
5. Ausblick
Mit dem Trend zu modulareren, intelligenteren und kompakteren Robotersystemen steigt der Bedarf an integrierten Antriebslösungen. Hohlwellen-Schrittmotoren bieten hier eine zukunftssichere Plattform, insbesondere in Kombination mit integrierter Elektronik und Feedbacksystemen. Durch Fortschritte in der Miniaturisierung und Antriebselektronik wird ihre Rolle in der Robotergelenksteuerung weiter wachsen.
Die Hohlwellen-Schrittmotorlösung stellt eine ideale Kombination aus Präzision, Integration und Flexibilität dar. Sie erlaubt eine neue Generation von Gelenkdesigns in der Robotik, die effizienter, platzsparender und anpassungsfähiger sind als je zuvor.
Verwandte Artikel: https://carl22.livedoor.blog/archives/9780614.html
Tin liên quan cùng chuyên mục Điện tử, điện lạnh
 2
2Cho thuê nhà xưởng uyên hưng, tân uyên, bd – 2.970m²
Cập nhật: 3 phút trước- 2
🛍 vốn ít mà muốn khởi nghiệp? nhập hàng giá tận xưởng - giao toàn quốc - 0822.879.469 (hảo)
Cập nhật: 3 phút trước - 2
Du lịch hẻm tu sản – tuyệt tác kỳ vĩ giữa núi rừng hà giang
Cập nhật: 4 phút trước - 2
Máy quét mã vạch honeywell voyager 1472g (2d) – quét nhanh, chính xác, không dây tiện lợi
Cập nhật: 5 phút trước - 2
Cho thuê nhà xưởng bắc tân uyên - bd 2.966m²
Cập nhật: 5 phút trước - 1
Nữ nên học nghề gì khi không học đại học? gợi ý thực tế, dễ xin việc
Cập nhật: 6 phút trước - 1
Máy dập ghim thùng carton chính hãng đài loan
Cập nhật: 9 phút trước - 2
💼 mới kinh doanh chưa biết lấy hàng ở đâu? gọi 0822.879.469 (hảo)
Cập nhật: 10 phút trước - 0
Có nên cấy tóc không - viện thẩm mỹ v - medical
Cập nhật: 12 phút trước - 0
Sức mạnh của video marketing trong việc thúc đẩy tăng trưởng doanh nghiệp
Cập nhật: 12 phút trước - 1
Máy giặt electrolux báo lỗi e10 - cách kiểm tra và xử lý đơn giản tại nhà
Cập nhật: 16 phút trước - 2
✨mâm cúng khai trương chuẩn lễ – khởi đầu thuận lợi, hút lộc ngày mở bán✨
Cập nhật: 17 phút trước - 0
Toàn tập digital audit: cách rà soát hệ sinh thái digital hiệu quả
Cập nhật: 18 phút trước - 2
🔥 muốn bán lời cao? chọn nguồn hàng giá gốc, ship toàn quốc - 0822.879.469 (hảo)
Cập nhật: 21 phút trước - 0
Đơn vị đo vẽ hoàn công nhà ở phường chánh hưng, tp. hcm
Cập nhật: 23 phút trước - 1
Cửa nhựa lùa abs hàn quốc ở quận 12
Cập nhật: 24 phút trước - 0
Lắp máy lạnh tủ đứng daikin công suất lớn cho nhà hàng
Cập nhật: 25 phút trước - 2
📦 tìm nguồn hàng ổn định, dễ bán? liên hệ 0822.879.469 (hảo)
Cập nhật: 26 phút trước - 2
Dịch vụ sửa tivi tận nhà tại sài gòn, quận 7 | điện tử nk - uy tín, giá rẻ
Cập nhật: 27 phút trước - 2
🚀 khởi nghiệp nhanh với nguồn hàng giá tốt - 0822.879.469 (hảo)
Cập nhật: 28 phút trước - 0
Campaign mùa hè: 10 chiến lược giúp thương hiệu tăng doanh số
Cập nhật: 30 phút trước - 0
Công dụng và chỉ định của cellcept 500mg là gì?
Cập nhật: 31 phút trước - 2
Cửa thép vân gỗ có mấy loại? phân tích chi tiết & hướng dẫn chọn lựa
Cập nhật: 32 phút trước - 0
Khấu trừ thuế quảng cáo: 10 câu hỏi giúp doanh nghiệp hiểu rõ hơn
Cập nhật: 33 phút trước - 0
Giày bảo hộ thoáng khí mùa hè
Cập nhật: 36 phút trước - 2
Chuyên cung cấp thiết bị điện - hộp số jscc 90gk7.5h
Cập nhật: 37 phút trước - 0
Xây dựng backlink hiệu quả: chiến lược phát triển liên kết bền vững
Cập nhật: 38 phút trước - 1
Máy hàn miệng bao liên tục chất lượng tốt, giá rẻ
Cập nhật: 39 phút trước - 0
Meta description trong seo: cách viết hiệu quả để thu hút click
Cập nhật: 41 phút trước - 0
Cách tối ưu chạy quảng cáo livestream tiktok để bùng nổ đơn hàng
Cập nhật: 43 phút trước - 0
Xu hướng du lịch khách sạn 2026: cơ hội và thách thức cho doanh nghiệp
Cập nhật: 44 phút trước - 1
Máy hàn miệng bao liên tục in date wp-1200v
Cập nhật: 46 phút trước - 1
Máy đai niềng thùng bán tự động d53xs2 của hãng strapack nhật
Cập nhật: 46 phút trước - 0
Xu hướng tiếp thị ngành du lịch trong kỷ nguyên chuyển đổi số 4.0
Cập nhật: 49 phút trước - 1
Máy quét mã vạch 2d zebra ds2278 – không dây linh hoạt, hiệu suất đỉnh cao
Cập nhật: 49 phút trước - 0
Fizzclean den ultimata lösningen för kraftfull säker och mångsidig rengöring
Cập nhật: 51 phút trước - 0
Quảng bá du lịch hiệu quả: chiến lược giúp điểm đến bứt phá năm 2026
Cập nhật: 51 phút trước - 4
Băng dính 3m siêu dính
Cập nhật: 54 phút trước - 1
[chínhchủ]cho thuê biệt thự,bình giã,300m2,4pn,4wc,hẻm xe hơi,38triệu
Cập nhật: 55 phút trước - 1
[chínhchủ] cần bán đất xã láng dài,đất đỏ,bà rịa-vũng tàu;1,3triệu/m2(1000m2)
Cập nhật: 56 phút trước - 1
Lắp đặt máy lạnh lg âm trần 5.5 ngựa cho showroom
Cập nhật: 59 phút trước - 1
Lắp đặt máy lạnh daikin âm trần 5 ngựa cho nhà hàng tiệc cưới
Cập nhật: 4 phút trước - 1
Lắp đặt máy lạnh âm trần cho văn phòng công ty tại hcm uy tín – giá tốt
Cập nhật: 5 phút trước - 1
[làm ngay] nhân viên giao hàng tân phú
Cập nhật: 5 phút trước - 0
Máy lạnh tủ đứng daikin công suất lớn – giải pháp làm mát cho nhà xưởng
Cập nhật: 15 phút trước - 0
Cấy tóc nữ - viện thẩm mỹ v - medical
Cập nhật: 20 phút trước - 0
Gg88 digital entertainment ecosystem with smart connectivity
Cập nhật: 30 phút trước - 0
Mmoo digital ecosystem for modern connected entertainment
Cập nhật: 35 phút trước - 0
Ace67 customer game service reward platform guide
Cập nhật: 41 phút trước - 0
Nnok advanced customer game service guide
Cập nhật: 41 phút trước

















![[chínhchủ]cho thuê biệt thự,bình giã,300m2,4pn,4wc,hẻm xe hơi,38triệu](/Img/2026/4/chinhchucho-thue-biet-thubinh-gia300m24pn4wchem-xe-hoi36trieu-01.jpg?w=250)
![[chínhchủ] cần bán đất xã láng dài,đất đỏ,bà rịa-vũng tàu;1,3triệu/m2(1000m2)](/Img/2026/4/chinhchu-can-ban-dat-xa-lang-daidat-doba-riavung-tau13trieum21000m2-01.jpg?w=250)



![[làm ngay] nhân viên giao hàng tân phú](/Img/2026/4/lam-ngay-nhan-vien-giao-hang-tan-phu-01.png?w=250)